

Discontinued as of March 2022
--------------------------------------
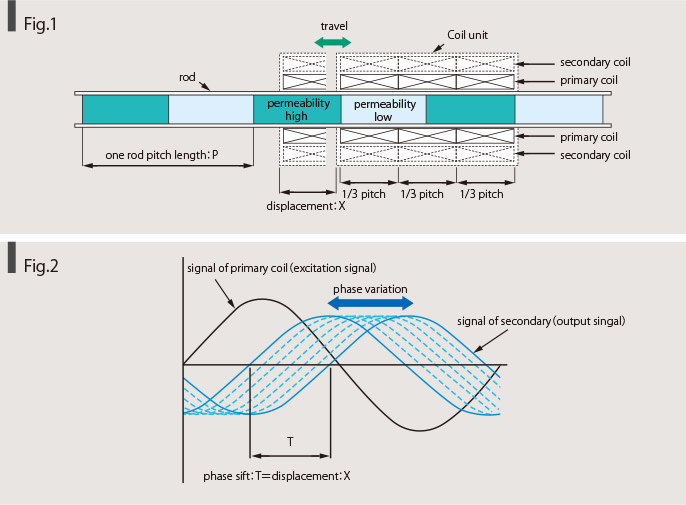
Fig.1 and Fig.2 show the fundamental principle of operation. Rod consists of high magnetic permeability parts and low magnetic permeability parts which are alternately put in the steel pipe.
Coil unit consists of three pairs of primary coil and secondary coil which are rolled up concentrically,and which are arranged at one third of one rod pitch length interval. Three sinusoidal excitation signals whose differences of phase are 120 degrees each other are put on above mentioned three primary coils as the input signals, and inductive signals appropriate to the inputs are induced on each corresponding three secondary coils. As the value of induced signals depend on the magnetic permeability of the part of rod, they are changed according to the shift of relative position between rod and coil unit. Therefore output signal (Y) is obtained as is shown in equation below by adding above three induced signals based on the addition theorem of trigonometric function.
The phase of output signal (Y) changes from 0 to 2pi compared with the one of excitation signal when the displacement (X) changes from 0 to P as is shown in Fig.2, then X is calculated by counting the phase shift (T).
| Linearity | (20+0.1xL)μm (L:stroke(mm)) |
|---|---|
| Resolution | 1μm |
| Repeatability | ±2μm |
| Temp. drift | 10ppmFS/°C |
| Positon | A, B pulse(multiplied by 4) line driver、pulse frequency:320kHz |
| Alarm | NPN Open collecto(r DC24V, ≦10mA) |
| Power Supply | DC24V(±10%), 150mA |
| Sampling frequency | 5kHz |
| Operating Temp. | 0-60°C |
| Storage Temp. | -40-80°C |
| Vibration | 6G |
| Shock | 50G(2msec) |
| Protection | IP67 |
Model PLR is a displacement sensor detecting the change of inductance caused by the deference of
magnetic permeability. It is the Linear Resolver measuring the shift of relative position between rod which
has the cyclic repetition of the change of magnetic permeabilty and amplifier unit which contains the coil
unit.
●By adopting innovative new rod, high accuracy and wide operation range are achieved. And 1 μm of
resolution is realized throughout rod length.
●Phase A and Phase B quadrature signals (90 degree phase deference / multiplied by 4) are output as
the position data.

① Effective stroke [mm]
□□□□ : Max.1500mm
② Rod
09: 8.95mm( standard)
③ Resolution
D8: 1μm( standard)
④ Output
LD : A, B pluse (line driver)
⑤ Cable
RG : pigtai(l robot cable)
□□ : 3m(standard)- 50m
F : cable end : free
 | ||||||